|
Janghyun Cho I am a Master's student in Artificial Intelligence at Sogang University, advised by Prof. Changjoo Nam. My research interests include multi-robot systems, path planning, and autonomous exploration. I did my Bachelor's degree in Software Convergence (Robot Vision track) at Kyung Hee University. |

|
ResearchI'm interested in multi-robot systems, autonomous exploration, and multi-agent path planning. |
Submitted |
|
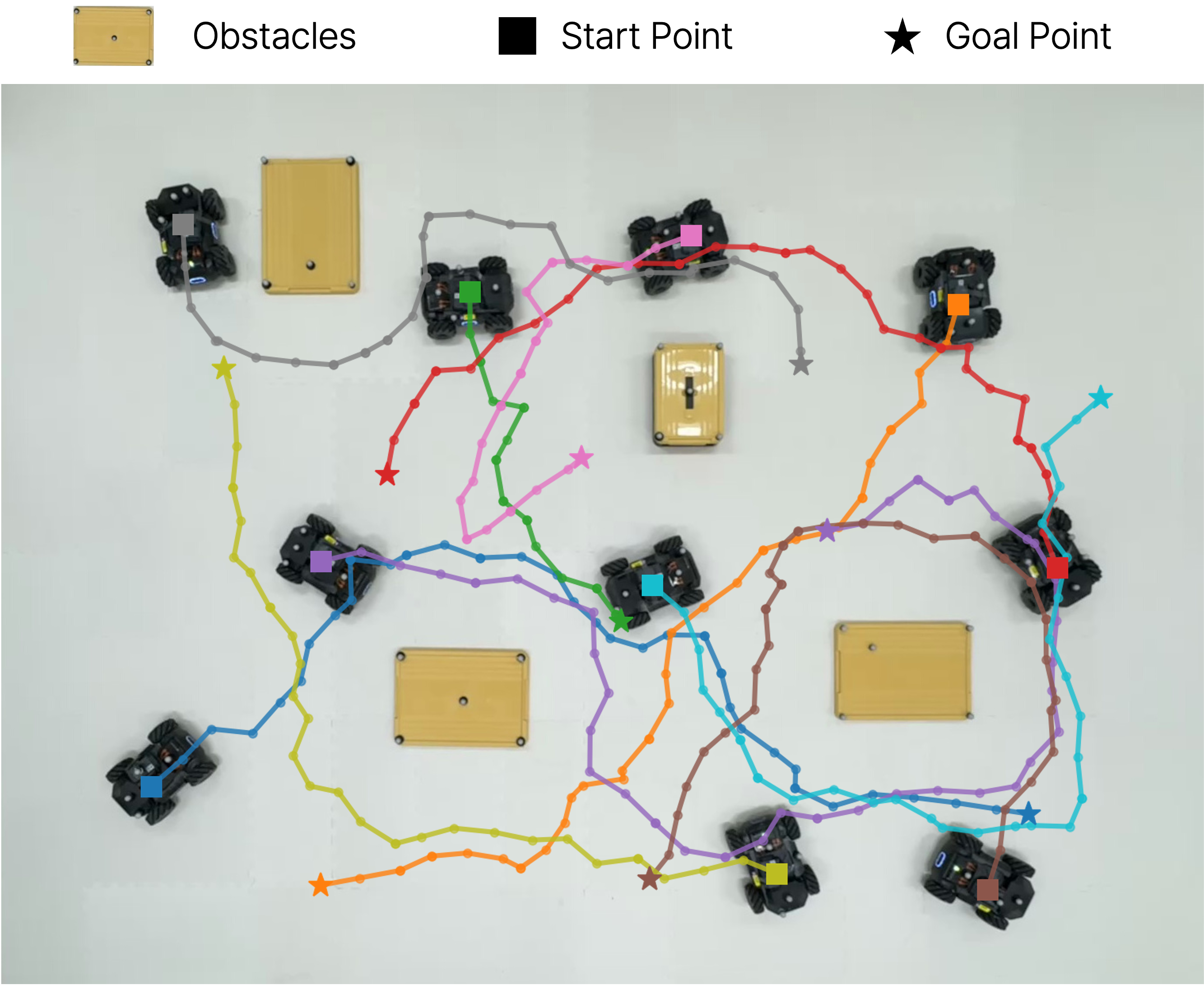
Safe Interval RRT∗
for Scalable Multi-Robot Path Planning in
Continuous Space
Joonyeol Sim, Joonkyung Kim, Janghyun Cho, Changjoo Nam Submitted, 2026 Two-level approach in which the low-level is a sampling-based single-robot path planner, Safe Interval RRT* (SI-RRT* ), that finds a collision-free spatio-temporal trajectory for an individual robot. |
Work in Progress |
|
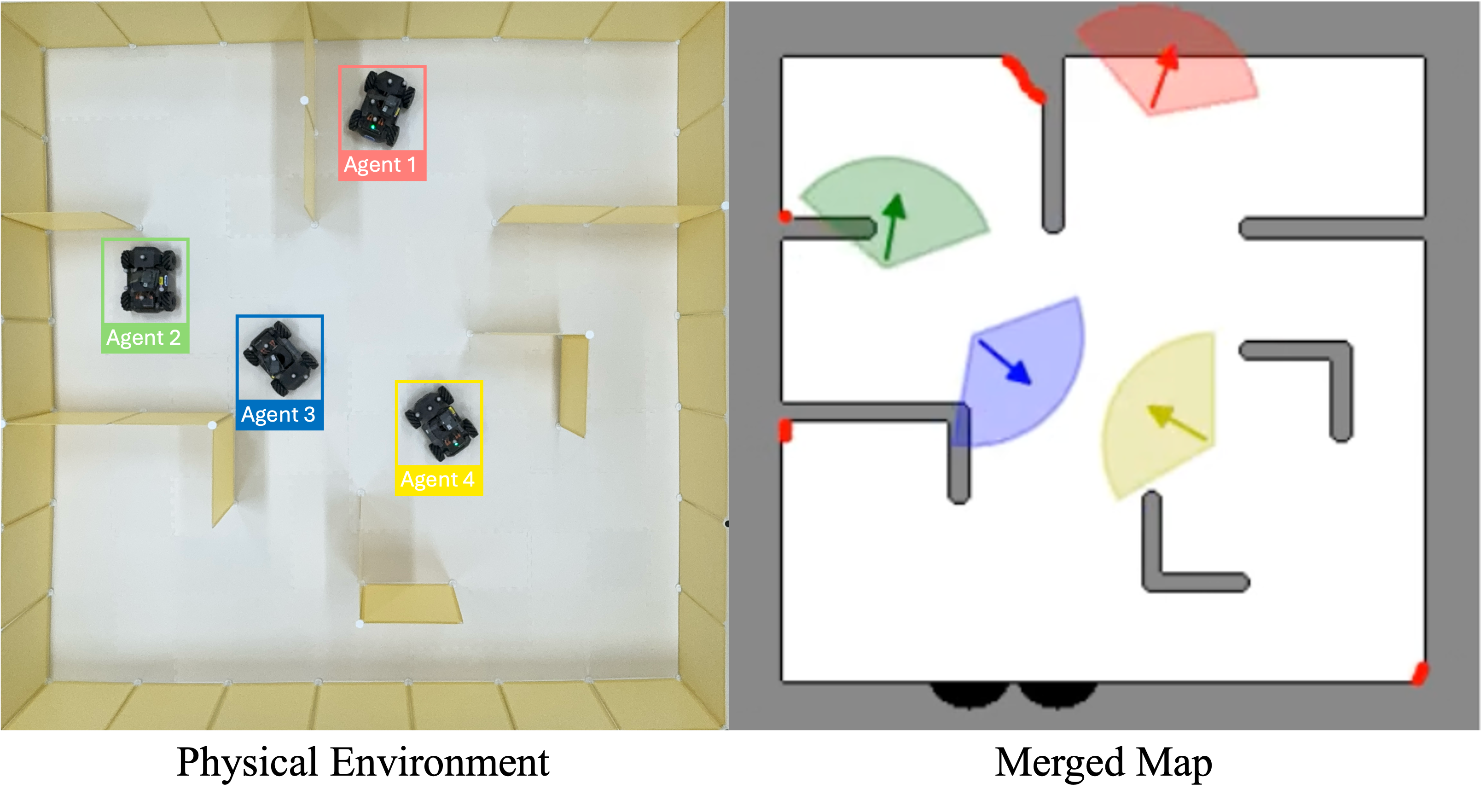
Multi-Robot Exploration
Janghyun Cho, Jimmy Chiun, Changjoo Nam In preparation
|
|
Design based on Jon Barron's website. |